Sembra un giocattolino, ma in realtà è una palestra mentale per sviluppare dei progetti di robotica che comprendono anche l’intelligenza artificiale (A.I.).
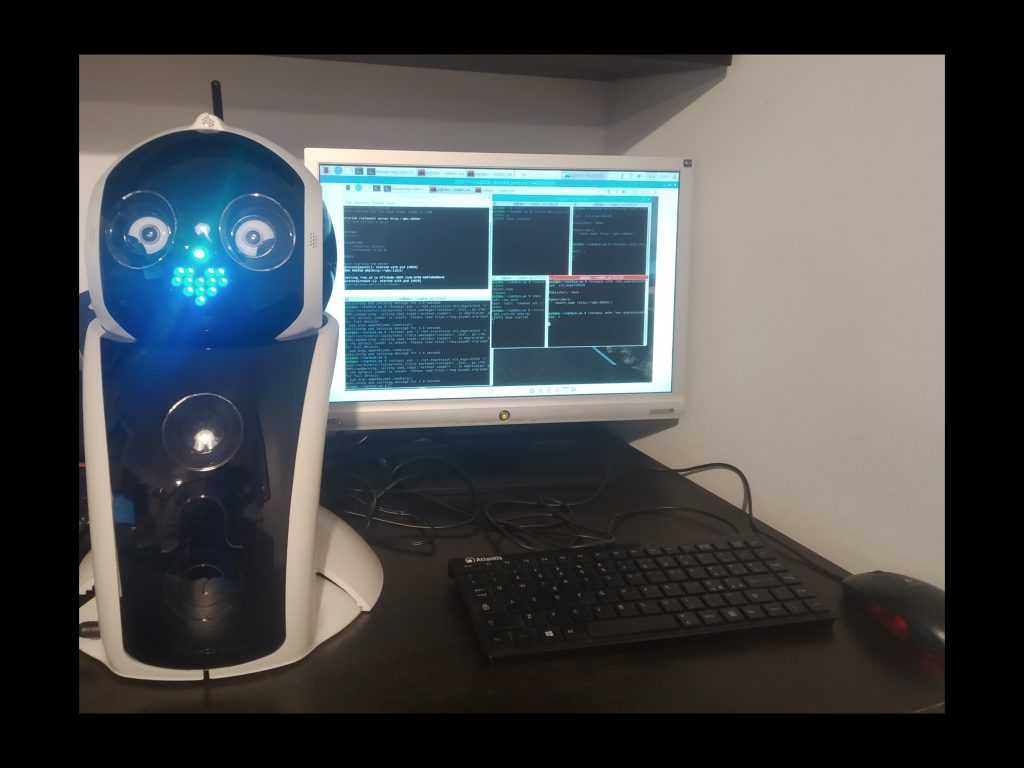
Q.bo One è un piccolo robottino open source educational robot di Thecorpora ( https://thecorpora.com/ ) con il quale si possono apprendere conoscenze nel mondo dell’informatica, dalla computervision (OpenCV) al riconoscimento vocale (Q.bo si connette con la piattaforma Mycroft) e diventa un “chatbot”.
Q.bo può essere implementato per lo sviluppo di tecniche applicate di deep learning con l’utilizzo di software quali TensorFlow, Keras, PyTorch.
Per chi si vuole inoltrare nell’avventura però consiglio di farlo solo con delle buone basi di informatica e, solo per darne un esempio, in questo articolo delineo i passi principali per l’attivazione di ROS Kinetic che potrebbe servire per apprendere le basi del Robot Operating Sistem, in questo caso installando questa versione sul Raspberry Pi3 in dotazione a Q.bo.
Procedura:
install Ros kinetic in raspberry pi3 from http://wiki.ros.org/ROSberryPi/Installing%20ROS%20Kinetic%20on%20the%20Raspberry%20Pi
step1:
$sudo apt-get install dirmngr
step2:
$sudo sh -c ‘echo “deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main” > /etc/apt/sources.list.d/ros-latest.list’
step3:
$sudo apt-key adv –keyserver hkp://ha.pool.sks-keyservers.net:80 –recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
step5:
$sudo apt-get update
step6:
$sudo apt-get upgrade
install boostrap dependencies
step7:
$sudo apt-get install -y python-rosdep python-rosinstall-generator python-$wstool python-rosinstall build-essential cma
initializing
step8:
$sudo rosdep init
step9:
$rosdep update
download Kinetic e installazione ( in Workspace):
creation for workspace:
step10:
$mkdir -p ~/ros_catkin_ws
step11:
$cd ~/ros_catkin_w
Download ROS packages:
step12:
$rosinstall_generator ros_comm –rosdistro kinetic –deps –wet-only –tar > kinetic-ros_comm-wet.rosinstall
step13:
$wstool init src kinetic-ros_comm-wet.rosinstall
(generation for folder “SRC” and 18 sub-folders in ~/ros_catkin_ws)
building ROS Kinetic (option J2)
step14:
$sudo ./src/catkin/bin/catkin_make_isolated –install -DCMAKE_BUILD_TYPE=Release –install-space /opt/ros/kinetic -j2
… compilation (for 52 packages) …. for raspberry pi3 you have to wait a long time and maybe restart more than once …
activate the installation
step15:
$source /opt/ros/kinetic/setup.bash
Or, have ROS environment variables automatically added to your bash session every time a new shell is launched (recommended)
step15_r:
$echo “source /opt/ros/kinetic/setup.bash” >> ~/.bashrc
test installation ROS Kinetic:
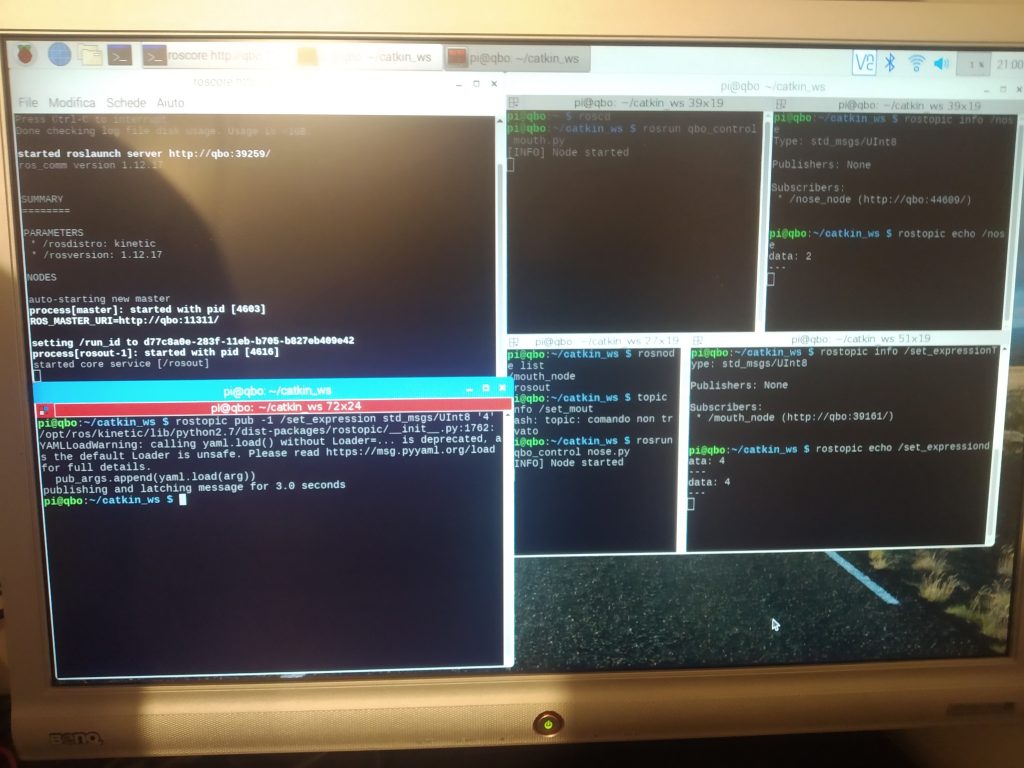
$ roscore
- /rosdistro: Kinetic
- /rosversion: 1.12.17
started core service [/rosout]
test applicativo utilizzando (qbo_control):